Diferencia entre el mapa de Disparidad y la Imagen de Disparidad en la coincidencia estéreo
Soy nuevo en el Emparejamiento estéreo. No podía entender el concepto de Disparidad. Por favor, dime qué es el mapa de disparidad y la imagen de disparidad y también Cuál es la diferencia entre ellos? ¿Son los dos términos iguales o diferentes?
2 answers
Disparidad
Disparidad se refiere a la distancia entre dos puntos correspondientes en la imagen izquierda y derecha de un par estéreo. Si observa la imagen de abajo, verá un punto etiquetado X (ignore X1, X2 y X3). Siguiendo la línea punteada de X a OL se ve el punto de intersección con el plano izquierdo en XL. El mismo principio se aplica con el plano de imagen de la derecha.
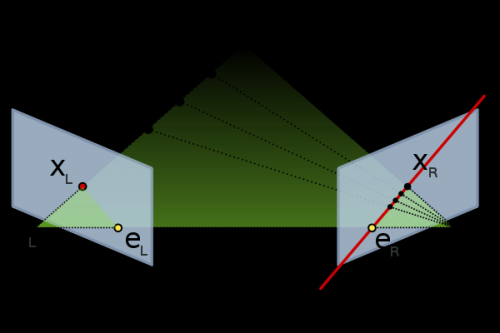
Si X se proyecta a un punto en el fotograma izquierdo XL = (u,v) y a la derecha frame at XR = (p, q) puede encontrar la disparidad para este punto como la magnitud del vector entre (u,v) y (p,q). Obviamente, este proceso implica elegir un punto en el marco de la mano izquierda y luego encontrar su coincidencia (a menudo llamado el punto correspondiente) en la imagen de la mano derecha; a menudo esta es una tarea particularmente difícil de hacer sin cometer muchos errores.
Mapa de Disparidad / Imagen
Si fuera a realizar este proceso de coincidencia para cada píxel en el imagen de la mano izquierda, encontrando su coincidencia en el marco de la mano derecha y calculando la distancia entre ellos, terminaría con una imagen donde cada píxel contenía el valor de distancia / disparidad para ese píxel en la imagen de la izquierda.
Ejemplo
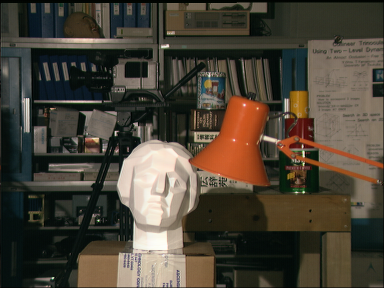
Dada una imagen de la izquierda
Y una imagen derecha
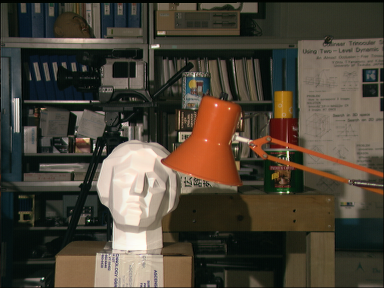
Haciendo coincidir cada píxel en la imagen de la izquierda con su píxel correspondiente en la imagen de la derecha y calculando la distancia entre valores de píxel (las disparidades) debe terminar con imágenes que se ven así:
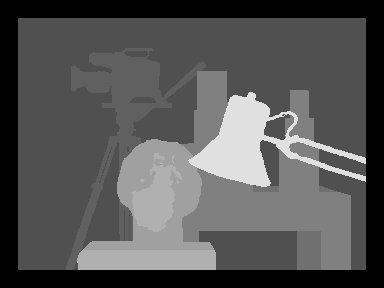
Esta imagen inferior se conoce como imagen/mapa de disparidad. Un tema útil para leer cuando se realiza la coincidencia estéreo es rectificación. Esto hará que el proceso de emparejar píxeles en la imagen izquierda y derecha sea considerablemente más rápido, ya que la búsqueda será horizontal.
Warning: date(): Invalid date.timezone value 'Europe/Kyiv', we selected the timezone 'UTC' for now. in /var/www/agent_stack/data/www/ajaxhispano.com/template/agent.layouts/content.php on line 61
2013-07-12 16:58:21
Uno de los métodos más fáciles para entender la disparidad sería parpadear, uno a la vez, alternando entre el ojo izquierdo y el derecho. Si observa, los objetos más cercanos a usted parecen saltar sobre su posición más que los objetos más alejados. Este cambio sería insignificante a medida que los objetos se alejan. Por lo tanto, en el mapa de disparidad, los tonos más brillantes representan más desplazamiento y menor distancia desde el punto de vista (cámara). Los tonos más oscuros representan un cambio menor y por lo tanto mayor distancia de la cámara.
Warning: date(): Invalid date.timezone value 'Europe/Kyiv', we selected the timezone 'UTC' for now. in /var/www/agent_stack/data/www/ajaxhispano.com/template/agent.layouts/content.php on line 61
2014-03-05 05:13:35