¿Cómo funciona la transformación de perspectiva en PIL?
La función de transformación de PIL tiene un modo de perspectiva que requiere un tupel de 8 datos, pero no puedo averiguar cómo convertir, digamos, una inclinación derecha de 30 grados a ese tupel.
¿alguien Puede explicarlo?
Aquí está la documentación: http://effbot.org/imagingbook/image.htm
4 answers
Para aplicar una transformación de perspectiva, primero debe conocer cuatro puntos en un plano A que se asignarán a cuatro puntos en un plano B. Con esos puntos, puede derivar la transformación homográfica. Al hacer esto, obtiene sus coeficientes 8 y la transformación puede tener lugar.
El sitio http://xenia.media.mit.edu/~cwren / interpolator / (mirror: WebArchive), así como muchos otros textos, describe cómo se pueden determinar esos coeficientes. Para hacer cosas fácil, aquí es una implementación directa de acuerdo con el enlace mencionado:
import numpy
def find_coeffs(pa, pb):
matrix = []
for p1, p2 in zip(pa, pb):
matrix.append([p1[0], p1[1], 1, 0, 0, 0, -p2[0]*p1[0], -p2[0]*p1[1]])
matrix.append([0, 0, 0, p1[0], p1[1], 1, -p2[1]*p1[0], -p2[1]*p1[1]])
A = numpy.matrix(matrix, dtype=numpy.float)
B = numpy.array(pb).reshape(8)
res = numpy.dot(numpy.linalg.inv(A.T * A) * A.T, B)
return numpy.array(res).reshape(8)
Donde pb son los cuatro vértices en el plano actual, y pa contiene cuatro vértices en el plano resultante.
Entonces, supongamos que transformamos una imagen como en:
import sys
from PIL import Image
img = Image.open(sys.argv[1])
width, height = img.size
m = -0.5
xshift = abs(m) * width
new_width = width + int(round(xshift))
img = img.transform((new_width, height), Image.AFFINE,
(1, m, -xshift if m > 0 else 0, 0, 1, 0), Image.BICUBIC)
img.save(sys.argv[2])
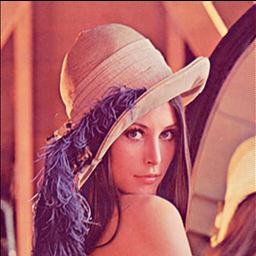
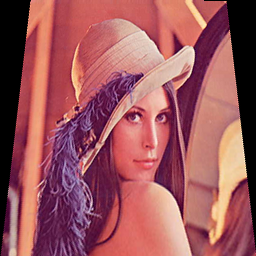
Aquí hay una muestra de entrada y salida con el código anterior:


Podemos continuar con el último código y realizar una transformación de perspectiva para revertir la cizalladura:
coeffs = find_coeffs(
[(0, 0), (256, 0), (256, 256), (0, 256)],
[(0, 0), (256, 0), (new_width, height), (xshift, height)])
img.transform((width, height), Image.PERSPECTIVE, coeffs,
Image.BICUBIC).save(sys.argv[3])
Resultante en:
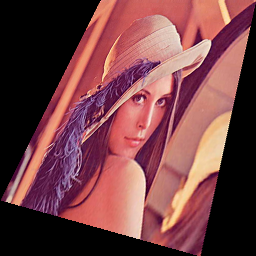
También puedes divertirte con los puntos de destino:
Warning: date(): Invalid date.timezone value 'Europe/Kyiv', we selected the timezone 'UTC' for now. in /var/www/agent_stack/data/www/ajaxhispano.com/template/agent.layouts/content.php on line 61
2018-08-05 12:50:59
Voy a secuestrar esta pregunta solo un poquito porque es lo único en Google que pertenece a las transformaciones de perspectiva en Python. Aquí hay un código ligeramente más general basado en lo anterior que crea una matriz de transformación de perspectiva y genera una función que ejecutará esa transformación en puntos arbitrarios:
import numpy as np
def create_perspective_transform_matrix(src, dst):
""" Creates a perspective transformation matrix which transforms points
in quadrilateral ``src`` to the corresponding points on quadrilateral
``dst``.
Will raise a ``np.linalg.LinAlgError`` on invalid input.
"""
# See:
# * http://xenia.media.mit.edu/~cwren/interpolator/
# * http://stackoverflow.com/a/14178717/71522
in_matrix = []
for (x, y), (X, Y) in zip(src, dst):
in_matrix.extend([
[x, y, 1, 0, 0, 0, -X * x, -X * y],
[0, 0, 0, x, y, 1, -Y * x, -Y * y],
])
A = np.matrix(in_matrix, dtype=np.float)
B = np.array(dst).reshape(8)
af = np.dot(np.linalg.inv(A.T * A) * A.T, B)
return np.append(np.array(af).reshape(8), 1).reshape((3, 3))
def create_perspective_transform(src, dst, round=False, splat_args=False):
""" Returns a function which will transform points in quadrilateral
``src`` to the corresponding points on quadrilateral ``dst``::
>>> transform = create_perspective_transform(
... [(0, 0), (10, 0), (10, 10), (0, 10)],
... [(50, 50), (100, 50), (100, 100), (50, 100)],
... )
>>> transform((5, 5))
(74.99999999999639, 74.999999999999957)
If ``round`` is ``True`` then points will be rounded to the nearest
integer and integer values will be returned.
>>> transform = create_perspective_transform(
... [(0, 0), (10, 0), (10, 10), (0, 10)],
... [(50, 50), (100, 50), (100, 100), (50, 100)],
... round=True,
... )
>>> transform((5, 5))
(75, 75)
If ``splat_args`` is ``True`` the function will accept two arguments
instead of a tuple.
>>> transform = create_perspective_transform(
... [(0, 0), (10, 0), (10, 10), (0, 10)],
... [(50, 50), (100, 50), (100, 100), (50, 100)],
... splat_args=True,
... )
>>> transform(5, 5)
(74.99999999999639, 74.999999999999957)
If the input values yield an invalid transformation matrix an identity
function will be returned and the ``error`` attribute will be set to a
description of the error::
>>> tranform = create_perspective_transform(
... np.zeros((4, 2)),
... np.zeros((4, 2)),
... )
>>> transform((5, 5))
(5.0, 5.0)
>>> transform.error
'invalid input quads (...): Singular matrix
"""
try:
transform_matrix = create_perspective_transform_matrix(src, dst)
error = None
except np.linalg.LinAlgError as e:
transform_matrix = np.identity(3, dtype=np.float)
error = "invalid input quads (%s and %s): %s" %(src, dst, e)
error = error.replace("\n", "")
to_eval = "def perspective_transform(%s):\n" %(
splat_args and "*pt" or "pt",
)
to_eval += " res = np.dot(transform_matrix, ((pt[0], ), (pt[1], ), (1, )))\n"
to_eval += " res = res / res[2]\n"
if round:
to_eval += " return (int(round(res[0][0])), int(round(res[1][0])))\n"
else:
to_eval += " return (res[0][0], res[1][0])\n"
locals = {
"transform_matrix": transform_matrix,
}
locals.update(globals())
exec to_eval in locals, locals
res = locals["perspective_transform"]
res.matrix = transform_matrix
res.error = error
return res
Warning: date(): Invalid date.timezone value 'Europe/Kyiv', we selected the timezone 'UTC' for now. in /var/www/agent_stack/data/www/ajaxhispano.com/template/agent.layouts/content.php on line 61
2014-06-06 23:38:27
Aquí hay una versión pure-Python de generar los coeficientes de transformación (como he visto esto solicitado por varios). Lo hice y lo usé para hacer el paquete de dibujo de imágenes PyDraw pure-Python.
Si lo usa para su propio proyecto, tenga en cuenta que los cálculos requieren varias operaciones de matriz avanzadas, lo que significa que esta función requiere otra, afortunadamente pure-Python, biblioteca de matriz llamada matfunc originalmente escrita por Raymond Hettinger y que puede descargar aquí o aquí.
import matfunc as mt
def perspective_coefficients(self, oldplane, newplane):
"""
Calculates and returns the transform coefficients needed for a perspective
transform, ie tilting an image in 3D.
Note: it is not very obvious how to set the oldplane and newplane arguments
in order to tilt an image the way one wants. Need to make the arguments more
user-friendly and handle the oldplane/newplane behind the scenes.
Some hints on how to do that at http://www.cs.utexas.edu/~fussell/courses/cs384g/lectures/lecture20-Z_buffer_pipeline.pdf
| **option** | **description**
| --- | ---
| oldplane | a list of four old xy coordinate pairs
| newplane | four points in the new plane corresponding to the old points
"""
# first find the transform coefficients, thanks to http://stackoverflow.com/questions/14177744/how-does-perspective-transformation-work-in-pil
pb,pa = oldplane,newplane
grid = []
for p1,p2 in zip(pa, pb):
grid.append([p1[0], p1[1], 1, 0, 0, 0, -p2[0]*p1[0], -p2[0]*p1[1]])
grid.append([0, 0, 0, p1[0], p1[1], 1, -p2[1]*p1[0], -p2[1]*p1[1]])
# then do some matrix magic
A = mt.Matrix(grid)
B = mt.Vec([xory for xy in pb for xory in xy])
AT = A.tr()
ATA = AT.mmul(A)
gridinv = ATA.inverse()
invAT = gridinv.mmul(AT)
res = invAT.mmul(B)
a,b,c,d,e,f,g,h = res.flatten()
# finito
return a,b,c,d,e,f,g,h
Warning: date(): Invalid date.timezone value 'Europe/Kyiv', we selected the timezone 'UTC' for now. in /var/www/agent_stack/data/www/ajaxhispano.com/template/agent.layouts/content.php on line 61
2014-09-23 21:11:40
Los 8 coeficientes de transformación (a, b, c, d, e, f, g, h) corresponden a la siguiente transformación:
X' = (ax + by + c) / (gx + hy + 1)
y' = (dx + ey + f) / (gx + hy + 1)
Estos 8 coeficientes se pueden encontrar en general resolviendo 8 ecuaciones (lineales) que definen cómo se transforman 4 puntos en el plano (4 puntos en ecuaciones 2D -> 8), vea la respuesta de mmgp para un código que resuelve esto, aunque puede encontrarlo un poco más precisa para cambiar la línea
res = numpy.dot(numpy.linalg.inv(A.T * A) * A.T, B)
A
res = numpy.linalg.solve(A, B)
Es decir, no hay ninguna razón real para invertir realmente la matriz A allí, o multiplicarla por su transposición y perder un poco de precisión, con el fin de resolver las ecuaciones.
En cuanto a su pregunta, para una simple inclinación de grados theta alrededor de (x0, y0), los coeficientes que está buscando son:
def find_rotation_coeffs(theta, x0, y0):
ct = cos(theta)
st = sin(theta)
return np.array([ct, -st, x0*(1-ct) + y0*st, st, ct, y0*(1-ct)-x0*st,0,0])
Y en general cualquier transformación afín debe tener (g, h) igual a cero. Espero que ayude!
Warning: date(): Invalid date.timezone value 'Europe/Kyiv', we selected the timezone 'UTC' for now. in /var/www/agent_stack/data/www/ajaxhispano.com/template/agent.layouts/content.php on line 61
2017-06-01 11:39:40