Algoritmo de Búsqueda de Forma Cuadrilátera
Quiero detectar y COMPLETAR todas las formas cuadriláteras posibles de segmentos de línea ubicados aleatoriamente!
La foto adjunta es un ejemplo, las líneas siempre pueden aparecer en lugares muy diferentes.
¿Alguien puede señalar algún buen algoritmo para esto?
- tenga en cuenta que los segmentos de línea son la salida de la transformación de Hough usando opencv 2.4.2
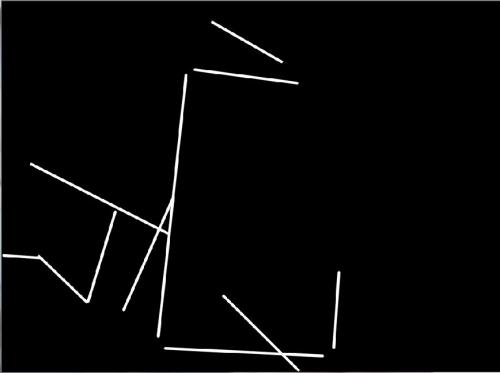
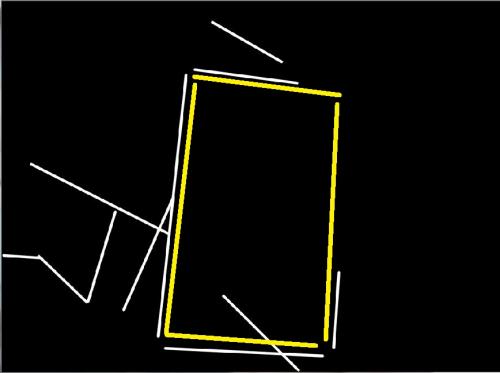
La solución es detectar y predecir el amarillo cuadrilátero
4 answers
En el caso de 11 segmentos de línea, tiene 330 formas de elegir cuatro segmentos. Usted podría determinar la probabilidad de que cada combinación haga un cuadrilátero, y calificar de esa manera.
Es posible que una transformada de Hough detecte formas que no sean líneas, aunque se vuelve más difícil de visualizar ya que el espacio acumulador requeriría más de dos dimensiones. Los círculos se pueden encontrar en tres dimensiones (midX, midY, radio), elipses en cuatro (creo). No estoy seguro exactamente cómo pocos parámetros que necesita para modelar un cuadrilátero, y creo que el rendimiento de la transformación de Hough comienza a caer cuando se obtiene más alto de tres dimensiones. El espacio del acumulador se vuelve tan grande que la relación de ruido aumenta significativamente.
Aquí hay una pregunta relacionada que puede tener algunas respuestas interesantes para usted.
Háganos saber cómo te va!
EDITAR
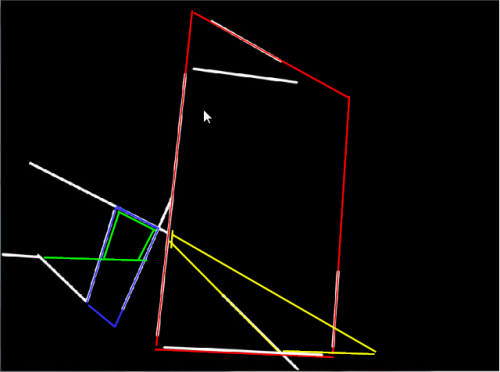
Tomé una puñalada en este problema hoy, y subido mi solución a GitHub . Hay demasiado código para publicar aquí.
Aquí hay una captura de pantalla que muestra la salida:

La solución que tomé es básicamente lo que describí anteriormente antes de esta edición.
- Encuentra todas las combinaciones de cuatro líneas
- Encuentra todas las permutaciones de esas cuatro líneas
- Evaluar la probabilidad de que esas cuatro líneas formen un cuadrilátero
- Toma el mejor partido
La evaluación funciona calculando una puntuación de error bruta. Esta es la suma de dos tipos diferentes de error:
- La desviación en cada esquina de 90 grados (uso la suma de errores al cuadrado en las cuatro esquinas)
- Cuando los segmentos de línea se cruzan dentro del segmento de línea, es probable que no sea una esquina válida
El segundo tipo de error podría ser determinado de una manera más robusta. Era necesario encontrar una solución para su conjunto de datos de muestra.
No he experimentado con otros conjuntos de datos. Puede necesitar algunos ajustes para hacerlo más robusto. He tratado de evitar el uso de demasiados parámetros para que sea sencillo de ajustar a un entorno en particular. Por ejemplo, para controlar la sensibilidad a la oclusión, como se ve en la imagen de muestra.
Encuentra la solución en unos 160 ms en mi computadora portátil. Sin embargo, no he hecho ninguna optimización de rendimiento. Espero que los métodos de búsqueda de combinaciones/permutaciones podrían optimizarse significativamente si necesita esto para correr más cerca de en tiempo real, como suele ser el caso con los experimentos de visión por computadora.
Warning: date(): Invalid date.timezone value 'Europe/Kyiv', we selected the timezone 'UTC' for now. in /var/www/agent_stack/data/www/ajaxhispano.com/template/agent.layouts/content.php on line 61
2017-05-23 12:32:01
Se pueden completar aproximadamente cuatro líneas para formar un cuadrilátero si no se imponen restricciones a los ángulos, etc.
Imagen con cuadriláteros potencialmente incorrectos:
Probablemente no quieras incluir cuadriláteros como el amarillo que se muestra en mi ejemplo. Debe tener restricciones en los ángulos, tamaño mínimo/máximo, relación de aspecto y el grado de finalización permitido. Si el 90 por ciento de las líneas tiene que ser añadido con el fin de formar un cuadrilátero completo esto sería probablemente no sea un buen candidato.
Me temo que tendrá que probar todas las combinaciones posibles de líneas y aplicar una heurística en ellas para darles puntos. Muchos puntos para ángulos cercanos a 90 grados (si lo que desea son rectángulos), para integridad, para relaciones de aspecto cercanas a la esperada, etc.
ACTUALIZACIÓN
Usar un sistema de puntos tiene ventajas sobre simplemente aplicar reglas estrictas.
- Un sistema de puntos le permite evaluar la calidad de los cuadriláteros y tomar el mejor o rechazar un cuadrilátero por completo.
- La buena calidad de una propiedad puede ayudar a superar la mala calidad de otra.
- Le permite dar diferentes pesos a diferentes propiedades.
Digamos que tienes una regla estricta (en pseudo código):
(angles == 90 +/- 10 degrees) && (line_completeness>50%)
Esto funcionaría, sin embargo puede conducir a situaciones como angles == 90 +/- 1 degree) && (line_completeness == 45%). De acuerdo con las reglas este cuadrilátero no pasaría debido a la pobre integridad de la línea; sin embargo, la calidad de los ángulos es excepcional, todavía por lo que es un muy buen candidato.
Es mejor dar puntos. Digamos 20 puntos para un ángulo de exactamente 90 grados, cayendo a 0 puntos para un ángulo de 90 + / -15 grados y 10 puntos para líneas completas hacia 0 puntos para líneas completas solo en un 25%, por ejemplo. Esto hace que los ángulos sean más importantes que la integridad de la línea y también crea condiciones más suaves para un problema que no tiene reglas absolutas.
Warning: date(): Invalid date.timezone value 'Europe/Kyiv', we selected the timezone 'UTC' for now. in /var/www/agent_stack/data/www/ajaxhispano.com/template/agent.layouts/content.php on line 61
2013-01-01 18:15:10
No uso C# por lo que tendrás que traducir el código. El siguiente código está en Java. Lo probé con el caso de prueba incluido. Aún no se como agregar archivos adjuntos a stackoverflow, así que estoy incluyendo el código real aquí.
Hay cuatro clases (ShapeFinder, Línea, Punto y Cuadrilátero) y una clase de prueba (ShapeFinderTest):
Clase ShapeFinder:
package stackoverflow;
import java.util.ArrayList;
import java.util.List;
public class ShapeFinder {
private List<Line> lines;
private List<Quadrilateral> allQuadrilaterals;
/*
* I am assuming your segments are in a list of arrays:
* [{{x1,y1,},{x2,y2}}, {{x1,y1,},{x2,y2}}, {{x1,y1,},{x2,y2}}]
* You can change this.
*
* So basically you call ShapeFinder with a list of your line segments.
*/
public ShapeFinder(List<Double[][]> allSegments) {
lines = new ArrayList<Line>(allSegments.size());
allQuadrilaterals = new ArrayList<Quadrilateral>();
for (Double[][] segment : allSegments) {
addSlopeInterceptForm(segment);
}
}
/**
* You call this function to compute all possible quadrilaterals for you.
*/
public List<Quadrilateral> completeQuadrilaterals() {
for (int w = 0; w < lines.size(); w++) {
for (int x = w + 1; x < lines.size(); x++) {
for (int y = x + 1; y < lines.size(); y++) {
for (int z = y + 1; z < lines.size(); z++) {
addQuadrilateral(w, x, y, z);
}
}
}
}
return allQuadrilaterals;
}
//assume {{x1,y1,},{x2,y2}}
private void addSlopeInterceptForm(Double[][] s) {
double x1 = s[0][0];
double y1 = s[0][1];
double x2 = s[1][0];
double y2 = s[1][1];
double m = (y1 - y2) / (x1 - x2);
double b = y2 - m * x2;
if (isInfinityOrNaN(m)) {
m = Double.NaN;
b = x1;
}
lines.add(new Line(m, b));
}
/*
* Given four lines, this function creates a quadrilateral if possible
*/
private void addQuadrilateral(int w, int x, int y, int z) {
Point wx = intersect(w, x);
Point wy = intersect(w, y);
Point wz = intersect(w, z);
Point xy = intersect(x, y);
Point xz = intersect(x, z);
Point yz = intersect(y, z);
if (notNull(wx) && notNull(xy) && notNull(yz) && notNull(wz) && isNull(wy) && isNull(xz)) {
allQuadrilaterals.add(new Quadrilateral(wx, xy, yz, wz));
}
}
private Point intersect(int c, int d) {
double m1 = lines.get(c).slope;
double b1 = lines.get(c).intercept;
double m2 = lines.get(d).slope;
double b2 = lines.get(d).intercept;
double xCor, yCor;
if ((isInfinityOrNaN(m1) && !isInfinityOrNaN(m2)) || (!isInfinityOrNaN(m1) && isInfinityOrNaN(m2))) {
xCor = isInfinityOrNaN(m1) ? b1 : b2;
yCor = isInfinityOrNaN(m1) ? m2 * xCor + b2 : m1 * xCor + b1;;
} else {
xCor = (b2 - b1) / (m1 - m2);
yCor = m1 * xCor + b1;
}
if (isInfinityOrNaN(xCor) || isInfinityOrNaN(yCor)) {
return null;
}
return new Point(xCor, yCor);
}
private boolean isInfinityOrNaN(double d){
return Double.isInfinite(d)||Double.isNaN(d);
}
private boolean notNull(Point p) {
return null != p;
}
private boolean isNull(Point p) {
return null == p;
}
}
Clase de línea:
package stackoverflow;
public class Line {
double slope;
double intercept;
public Line(double slope, double intercept) {
this.slope = slope;
this.intercept = intercept;
}
}
Clase de punto:
package stackoverflow;
class Point {
double xCor;
double yCor;
public Point(double xCor, double yCor) {
this.xCor = xCor;
this.yCor = yCor;
}
public String toString(){
return "("+xCor+","+yCor+")";
}
}
Cuadrilátero clase:
package stackoverflow;
public class Quadrilateral {
private Point w, x, y, z;
public Quadrilateral(Point w, Point x, Point y, Point z) {
this.w = w;
this.x = x;
this.y = y;
this.z = z;
}
public String toString() {
return "[" + w.toString() + ", " + x.toString() + ", " + y.toString() + ", " + z.toString() + "]";
}
}
PRUEBA UNITARIA:
package stackoverflow;
import java.util.ArrayList;
import java.util.List;
import org.junit.Test;
public class ShapeFinderTest {
@Test
public void testCompleteQuadrilaterals() {
List<Double[][]> lines = new ArrayList<>();
lines.add(new Double[][]{{2., 5.}, {6., 5.}});
lines.add(new Double[][]{{2., 1.}, {2., 5.}});
lines.add(new Double[][]{{2., 1.}, {6., 1.}});
lines.add(new Double[][]{{6., 5.}, {6., 1.}});
lines.add(new Double[][]{{0., 0.}, {5., 1.}});
lines.add(new Double[][]{{5., 5.}, {10., 25.}});
ShapeFinder instance = new ShapeFinder(lines);
List<Quadrilateral> result = instance.completeQuadrilaterals();
for (Quadrilateral q : result) {
System.out.println(q.toString());
}
}
}
Warning: date(): Invalid date.timezone value 'Europe/Kyiv', we selected the timezone 'UTC' for now. in /var/www/agent_stack/data/www/ajaxhispano.com/template/agent.layouts/content.php on line 61
2013-01-01 01:15:43
De los ejemplos, asumo que la pregunta está más a lo largo de las líneas de Encontrar todos los cuadriláteros que tienen una línea contenida completamente dentro de cada uno de sus lados. Esto no está del todo claro en la explicación proporcionada.
A continuación se muestra un pseudocódigo razonablemente fácil de implementar. Ahora solo para crear una estructura de datos eficiente para evitar la complejidad O (N^4). Tal vez ordenar las líneas por posición o gradiente.
I,j,k, l son los siguientes:
l
|---|
j| |k
|---|
i
extendIntersect es simplemente una función eso extiende las 2 líneas hasta el infinito (o hasta los límites que elija) y devuelve el punto donde se cruzan, fácil de hacer matemáticamente.
onLine devuelve true si un punto se encuentra en una línea.
onSameSide devuelve true si ambos puntos se encuentran en el mismo lado de una línea
for (Line i = lines[0]:lines[lineCount])
for (Line j = lines[1]:lines[lineCount])
Point ijIntersect = extendIntersect(i, j)
if (ijIntersect == NULL || onLine(ijIntersect, i) || onLine(ijIntersect, j))
continue;
for (Line k = lines[2]:lines[lineCount])
Point ikIntersect = extendIntersect(i, k)
if (ikIntersect == NULL || onLine(ikIntersect, i) || onLine(ikIntersect, k) ||
onSameSide(ijIntersect, ikIntersect, i)) continue
for (Line l = lines[3]:lines[lineCount])
Point jlIntersect = extendIntersect(j, l)
Point klIntersect = extendIntersect(k, l)
if (jlIntersect == NULL || onLine(jlIntersect, j) || onLine(jlIntersect, l) ||
klIntersect == NULL || onLine(klIntersect, k) || onLine(klIntersect, l) ||
onSameSide(jlIntersect, ijIntersect, j) ||
onSameSide(klIntersect, ikIntersect, k)) continue
printQuad(ijIntersect, ikIntersect, klIntersect, jlIntersect)
Algún tipo de comprobación de errores como Drew Noakes sugirió también podría ser una buena idea.
Warning: date(): Invalid date.timezone value 'Europe/Kyiv', we selected the timezone 'UTC' for now. in /var/www/agent_stack/data/www/ajaxhispano.com/template/agent.layouts/content.php on line 61
2012-12-31 11:15:02